Японцы учат листообразного робота покорять любой ландшафт

Для того чтобы научить роботов перемещаться по разным поверхностям и в разных средах, инженерам необходимо создавать отдельные схемы управления для ходьбы, плавания или полётов своих созданий. Это обстоятельство существенно ограничивает существующие модели: они не способны адаптироваться к новым условиям на местности самостоятельно.
Для поиска нового решения робототехники из Исследовательского института электрических коммуникаций в университете Тохоку (Research Institute of Electrical Communication Tohoku University) обратили своё внимание сначала на змей, которые стремительно скользят, прижав тело к земле, будто катаясь на коньках.
А потом они пришли к мысли присмотреться к плоским червям. Эти животные обладают ещё большими возможностями в передвижении в разнообразных средах.
В конце концов, исследователи решили проблему сиюминутной адаптации к поверхности и управления роботом: для этого они снабдили своё детище подвижным сетчатым основанием, которое позволяет осуществлять распределённое управление движением.
Для реализации своей идеи Такеши Кано (Takeshi Kano) и его коллеги Акио Исигуро (Akio Ishiguro) и Юки Ватанабе (Yuki Watanabe) создали компьютерную модель, в которой соединили свои знания о змеях и плоских червях. Она продемонстрировала, что робот будет эффективно передвигаться по любой неизвестной местности, адаптируясь к окружающей среде в режиме реального времени.
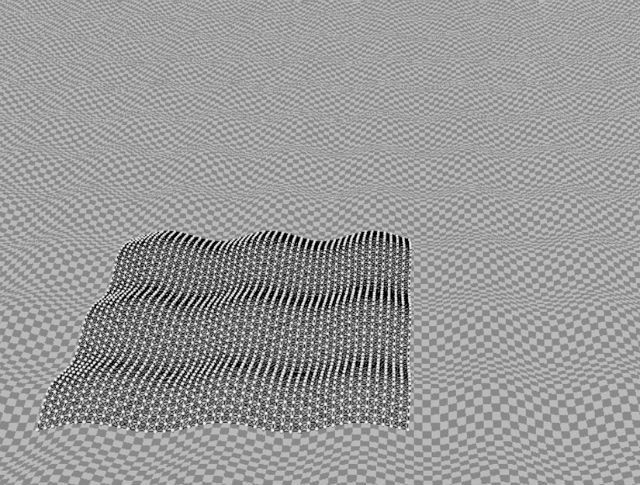
На картинке выше представлена сетка, состоящая из пяти параллельных элементов, имитирующих змей, движущихся в одном направлении. Эта пятёрка соединена с пятью другими, движущимися в перпендикулярном направлении.
В статье в журнале Bioinspiration and Biomimetics японцы пишут, что они уже выпустили базовый прототип робота, который пока движется в одном направлении.
Следующим шагом для робототехников будет создание образца, способного передвигаться в любом направлении, а также адаптироваться к водным условиям и даже летать. Специалистам предстоит создать силовые приводы (двигатели, систему управления и прочие компоненты). Ведь в данном случае все компоненты должны быть приспособлены для контакта с мягкими структурами "тела" робота.
Также по теме:
Инженеры Гарварда научили мягкого робота маскироваться под окружающую среду
Новый робот-щупальце аккуратно захватывает даже самые хрупкие предметы
Препятствия помогают червям двигаться быстрее
Создан робот-медуза, приводимый в движение клетками сердечной мышцы крысы
Учёные научились получать энергию от жуков-киборгов















