Немецкая компания выпустила прыгающего робота-кенгуру






Изобретатели в очередной раз вдохновились примером из животного мира и создали бионического кенгуру, который не ходит, а забавно прыгает, воспроизводя уникальный способ передвижения настоящего зверя.
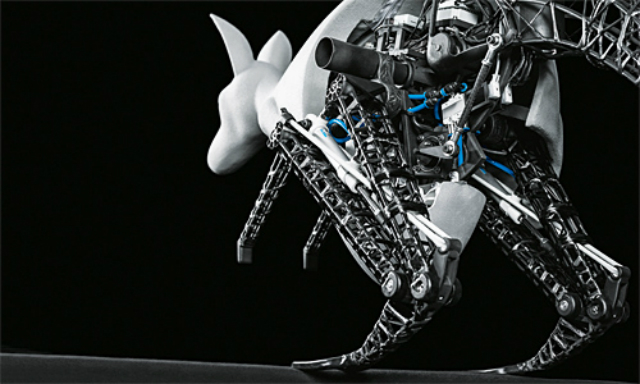
BionicKangaroo был разработан специалистами немецкой промышленной компании автоматизации Festo.
Эластичные пружины в каждой ноге робота, как сухожилия в задних лапах кенгуру, эффективно используют энергию одного прыжка для совершения следующего. Без такой способности реальные кенгуру слишком быстро уставали бы, но их упругие сухожилия помогают передвигаться прыжками на высоких скоростях в течение длительных периодов времени.
Для питания пневматической системы, приводящей робокенгуру в движение, машина использует небольшой компрессор или пневмоаккумулятор. Он обеспечивает высокое давление воздуха в пневматических мускулах. Электронные компоненты (в том числе датчики управления и элементы кинематической системы, позволяющие роботу сохранять равновесие) питаются от легких аккумуляторов.
Роботизированный кенгуру весит всего 7 килограммов, в высоту же он достигает одного метра. Механический зверь способен прыгнуть в длину на 80 сантиметров и в высоту на 40 сантиметров. Такие результаты весьма впечатляют, хотя в скорости бионическое животное существенно уступает реальному.
Перед первым прыжком упругое пневматическое сухожилие предварительно натягивается. Бионический кенгуру сдвигает центр тяжести вперёд и начинает наклон. Как только он достигнет определённого угла при соответствующей угловой скорости, пневматические цилиндры активируются, энергия из сухожилия высвобождается и кенгуру подпрыгивает. Во время полёта робот выбрасывает свои лапы вперёд – это создаёт крутящий момент в бедре, который искусственное животное компенсирует с помощью хвоста. Таким образом, верхняя часть тела остаётся в почти горизонтальном положении.
После посадки сухожилие снова натягивается, преобразовывая кинетическую энергию предыдущего прыжка в потенциальную. Благодаря этому энергия сохраняется в системе и может быть высвобождена в течение второго прыжка. Фаза посадки (критический способ извлечения энергии) отвечает за эффективность прыжков. Во время этой фазы хвост движется к земле, возвращаясь в исходное положение.
Контроль над роботом осуществляется с помощью жестов благодаря повязке Thalmic Labs MYO, считывающей миоэлектрические сигналы с предплечья оператора.
BionicKangaroo – один из членов киберзверинца, спроектированного Festo для ежегодного проекта Bionic Learning Network.
Немецкие учёные наблюдают за природой, чтобы разработать для техники более эффективные способы захвата предметов и перемещения по различной местности. Среди других изобретений проекта летающая подобно чайке Smartbird, механическая стрекоза BionicOpter, плавающий робот-пингвин и робот-хобот.
В апреле 2014 года бионический кенгуру будет представлен на выставке Hannover Messe. Массовое производство подобных роботов не планируется.
Также по теме:
Роботы-термиты самостоятельно построили фигурную стену
Новый швейцарский робот способен на трюки в духе Человека-паука
Мягкая роботизированная рыба научилась двигаться подобно настоящей
Четвероногий "робомул" стал быстрее и умнее
Дизайнер разрабатывает проект экзоскелета-вездехода, пилотируемого человеком
Роботов из бумаги сделали силачами при помощи воздуха











