Рекомендации
Мой канал
Новости
Эфир
Каталог
Поиск
Главная
Каталог
Радиопрограмма
Хай-тек
2024
Выпуск 04 октября
Хай-тек
Выпуск 04 октября 2024 года
Выпуски
2026
2025
2024
2023
2022
2021
2020
2019
2018
2017
2016
2015
2014
2013
2012
2011
2010
26
25
24
23
22
21
20
19
18
17
16
15
14
13
12
11
10
2026
2026
16 апреля
3 мин
Пробивающий шумозащиту звонок - пиар или не только?
13 апреля
3 мин
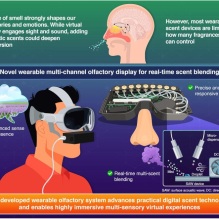
"Ароматическо-инженерный заговор": в чём технологический прорыв?
10 апреля
3 мин
Шедевры будут напрямую из головы своих творцов
9 апреля
4 мин
Земля немного изменилась и хуже выглядит теперь?
2 апреля
3 мин
Учёные научились "сдвигать" опасные астероиды
26 марта
3 мин
Астероиды – источник полезных ископаемых
22 марта
3 мин
"Четвертьгуманоидный" робот с лицом милой девушки вовсе не пугает
17 марта
3 мин
Для пользования умной подушкой нужна сила воли
16 марта
3 мин
Комета 3I/ATLAS – инопланетный зонд?
12 марта
3 мин
"Зубастая" покрышка адаптируется к погоде
6 марта
3 мин
Электроконь придёт на смену тракторам?
26 февраля
4 мин
Собаки нас и правда понимают
25 февраля
3 мин
Добыча воды из воздуха не так уж безобидна?
18 февраля
3 мин
Робот Isaac 0 складывает бельё, как двухлетний ребёнок
17 февраля
3 мин
Борьба с тачскринами в авто: какие кнопки должны быть физическими
12 февраля
3 мин
Грибы нам помогут построить жильё!
10 февраля
3 мин
Воздушный шарик – тоже аккумулятор
9 февраля
3 мин
Войны за воду – дело ближайшего будущего?
6 февраля
4 мин
Чистить зубы порошком долго, но полезно!
5 февраля
4 мин
Робот в куртке – странно, но эффективно?
29 января
3 мин
Сама по себе: роборука может бегать и приносить предметы
29 января
3 мин
Толстые подтяжки и ремень спасут велосипедиста
22 января
4 мин
Композит, который сам себя лечит
21 января
4 мин
Первое в мире видео чёрной дыры: ждать осталось всего лишь год...
20 января
3 мин
"Живой дисплей": кожа покажет, что что-то не так
15 января
3 мин
Крякающий звездолёт, или чему научат "умные" кубики
14 января
3 мин
Смартфон "прощай, молодость"
13 января
3 мин
Эра индивидуальной обуви ещё впереди
Еще
интересное
28 выпусков
Большой хай-тек
Наука, Новостные
263 выпуска
Ученый совет
2023
, Наука
124 выпуска
Наука 2.0
Наука
1090 выпусков
Завтра в мире
2008
, Наука
16 выпусков
"Приближая космос". Поэтический проект
Исторические, Музыкальные, наука
Персоны
Николай Гринько